
Что такое тактильные рецепторы кожи
Обновлено: 27.04.2024
Тактильные рецепторы
Тактильные рецепторы , или рецепторы прикосновения и давления расположены на поверхности кожи.
Рецепторами прикосновения являются мейснеровы тельца, находящиеся в кожных сосочках, и меркелевы диски, расположенные особенно в большом количестве на кончиках пальцев и губах. На коже, покрытой волосами, высокочувствительны к прикосновению волосы. Это объясняется тем, что корень волоса обвивается нервным сплетением и всякое прикосновение к волосу передается этому сплетению, вызывая его возбуждение. Сбривание волос сильно понижает чувствительность кожи к прикосновению. Рецепторами давления являются пачиниевы тельца.
Проводниками тактильной рецепции служат толстые миелиновые волокна. Электрофизиологическая регистрация потенциалов действия показала, что даже при очень коротком раздражении тактильных рецепторов в них возникает не один импульс, а целая серия разрядов.
Адаптация тактильных рецепторов . Тактильные рецепторы способе к быстрой адаптации, поэтому ощущается только изменение давления, а не само давление. Если на подошвенную подушечку лапы кошки положить груз, то в рецепторе возникают нервные импульсы, частота которых может достигать 250—350 имп/сек. Эта импульсация длится несколько секунд и прекращается вследствие наступления адаптации. У человека уменьшение частоты импульсов сопровождается уменьшением силы ощущения.
Скорость адаптации разных кожных рецепторов неодинакова. Haиболее быстро адаптируются рецепторы, расположенные у корней волос, и пачиниевы тельца.
Вследствие адаптации человек ощущает давление одежды только в тот момент, когда ее надевает или когда при движении одежда трется о кожу.
Локализация тактильных ощущении . Все ощущения прикосновения и давления человек очень точно относит к определенному месту кожи. Локализация осязательных ощущений вырабатывается посредством опыта под контролем других органов чувств, главным образом зрения и мышечного чувства. Для доказательства можно привести знаменитый опыт Аристотеля: прикосновение перекрещенными указательным и средним пальцами к маленькому шарику дает ощущение прикосновения к двум шарикам, так как обыденный опыт учит, что внутренней стороны указательного пальца и наружной стороны среднего одновременно могут касаться только два раздельных шарика.
Измерение тактильной чувствительности . Тактильная чувствительность развита весьма различно на разных местах кожи. Тактильную чувствительность измеряют эстезиометром Фрея, с помощью которого определяют силу давления, необходимую для раздражения рецепторов и возникновения ощущения.
Порог раздражения самых чувствительных участков кожи равен 50 мг, наименее чувствительных — 10 г. Чувствительность губ, носа, языка наиболее высока, чувствительность спины, подошвы стопы, живота наименьшая.
Пороги пространства . При одновременном прикосновении к двум точкам кожи не всегда ощущаются два прикосновения: если эти две точки лежат близко друг к другу, то может возникнуть ощущение только одного прикосновения. То наименьшее расстояние между двумя точками кожи, при раздражении которых возникает ощущение двух прикосновений, называется порогом пространства.
Пороги пространства измеряют с помощью циркуля, или эстезиометра Вебера, представляющего собой циркуль со шкалой, обозначающей расстояние между его ножками в миллиметрах.
Пороги пространства весьма различны на разных местах кожи, т. е. ощущение двух прикосновений возникает при разном расстоянии ножек циркуля ( рис. 194 ). Пороги пространства минимальны на кончиках пальцев, губах и кязыке, где они равны 1—2,5 мм, и максимальны на бедре, плече и спине (свыше 00 мм).
Пороги пространства отчасти зависят от того, насколько афферентные нервные волокна ветвятся на периферии и от какого числа рецепторов передает импульсы одно нервное волокно. Согласно электрофизиологическим наблюдениям, площадь кожной поверхности, иннервируемой одним аыферентным волокном, в разных участках тела различна и составляет от нескольких квадратных миллиметров до 2—3 см2 н более.
Рис. 194. Величины порогов пространства на разных участках тела человека.
Соматовисцеральная система перерабатывает сенсорную информацию нескольких модальностей, получая ее от кожи, мышц, суставов, внутренних органов и кровеносных сосудов. Она содержит разные типы рецепторов: механорецепторы, терморецепторы, хеморецепторы, осморецепторы, но-цицепторы. Поступающая информация передается по афферентным волокнам в составе чувствительных и смешанных нервов, перерабатывается раздельными проводящими путями и переключательными ядрами, а затем доставляется в соматосенсорную кору, занимающую постцентральные извилины мозга и организованную топически.
Тактильная чувствительность
Часть соматовисцеральной системы, обеспечивающая чувство осязания, включает несколько разновидностей механорецепторов кожи, представленных свободными нервными окончаниями либо инкапсулированными, т. е. заключенными в капсулу из соединительной ткани или видоизмененных клеток эпидермиса (рис. 17.4). Свободные нервные окончания иннервируют волосяные фолликулы пушковых волос, покрывающих большую часть тела человека, а также грубых волос, растущих на голове, в подмышечных впадинах, на лобке, а у мужчин еще и на лице. Свободные нервные окончания волосяных фолликулов являются механоре-цепторами и возбуждаются при смещении волос или их подергивании. Другая разновидность свободных нервных окончаний имеется в эпидермисе и в сосочковом слое дермы, большинство из них являются ноцицепторами или терморецепторами, но некоторые принадлежат к механорецепторам, которые специфически реагируют на слабое околопороговое раздражение. Предполагается, что при раздражении этой разновидности рецепторов возникают ощущения щекотки и зуда.
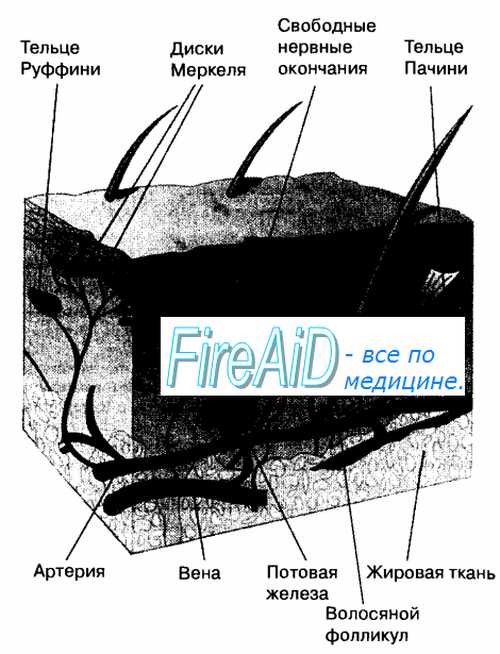
Рис. 17.4. Схема распределения механорецепторов в коже человека. Свободные нервные окончания имеют высокий порог раздражения и слабо реагируют на изменение интенсивности стимула. Быстро адаптирующиеся рецепторы (тельца Пачини, рецепторы волосяных фолликулов) служат датчиками скорости действующих стимулов, а медленно адаптирующиеся рецепторы (диски Меркеля, тельца Руффини) являются датчиками интенсивности действующего раздражителя. Наличие нескольких разновидностей рецепторов позволяет передавать афферентные сигналы о разных свойствах одного и того же раздражителя.
Среди инкапсулированных окончаний различают тельца Пачини, Мейсснера, Руффини, диски Меркеля, тактильные тельца Пинкуса—Игго, колбы Краузе. В зависимости от строения и формы капсулы нервные окончания подвержены наиболее сильному воздействию либо в результате давления действующим перпендикулярно раздражителем, либо вследствие бокового смещения капсулы, которая играет роль механического преобразователя энергии внешних стимулов. Большинство инкапсулированных рецепторов содержится в лишенной волос коже пальцев рук и ног, ладоней и подошв, лица, губ, языка, сосков и половых органов, где они распределены с различной плотностью и на разной глубине. Тельца Пачини имеются также в сухожилиях, связках и брыжейке.
Механорецепторы кожи различаются по скорости адаптации к действующему раздражителю. Быстроадаптирующиеся (фазные) рецепторы возбуждаются только в момент смещения кожи и волос и служат датчиками скорости воздействия стимула. Это свойство присуще тельцам Мейснера, рецепторам волосяных фолликулов и особенно тельцам Пачини, способным реагировать на изменения скорости продолжающего свое действие стимула. Медленно адаптирующиеся (тонические) рецепторы не прекращают генерировать потенциалы действия при продолжительном действии раздражителя, если он оказывает давление на кожу: такие рецепторы служат датчиками интенсивности действующего стимула (тельца Руффини, диски Меркеля).

Таблица 17.1. Пространственный двухточечный порог в разных участках тела
Площадь рецептивных полей сенсорных нейронов, иннервирующих тельца Мейснера и диски Меркеля, составляет в среднем около 12 мм2, а у нейронов с окончаниями в виде телец Пачини и Руффини она на порядок больше. Рецептивные поля различающихся своими рецепторами сенсорных нейронов перекрываются, поэтому при действии на кожу комплекса стимулов одновременно возбуждаются разные виды рецепторов, что позволяет ощущать все динамические и статические свойства такого комплекса. Обработка и анализ информации сигналов от различных рецепторов происходит на высших уровнях сенсорной системы, формирующих комплексное восприятие действующих на поверхность тела стимулов. Плотность меха-норецепторов в разных участках кожи не одинакова, чем определяются разные показатели пространственного дифференциального порога, т. е. наименьшего расстояния между двумя точками, раздражение каждой из которых ощущается раздельно (табл. 17.1). Приведенные в таблице данные не следует считать эталоном, поскольку дифференциальная чувствительность различается у разных людей.
Инкапсулированные рецепторы иннервируются миелинизированными волокнами первичных сенсорных нейронов, которые проводят нервные импульсы в ЦНС со скоростью около 30—70 м/с. Немиелинизированные волокна передают потенциалы действия от свободных нервных окончаний со значительно меньшей скоростью — около 1 м/с, поэтому ощущение действующего на них стимула возникает относительно позже. Центральные отростки первичных сенсорных нейронов входят в спинной мозг в составе задних корешков и разделяются в задних рогах спинного мозга на коллатерали. Восходящие коллатерали достигают переключательных ядер заднего столба продолговатого мозга, откуда специфическая информация передается на противоположную сторону мозга по лемнисковому пути, поступает к проекционным ядрам таламуса, а затем в соматосенсорную кору, с участием которой формируется чувство осязания.
Сенсорные рецепторы. Типы сенсорных рецепторов и раздражители
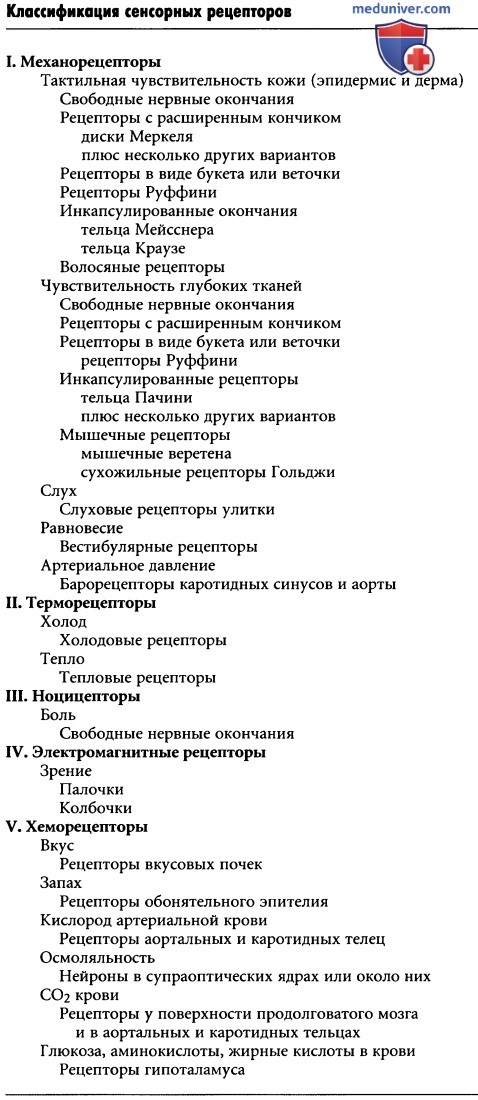
а) Типы сенсорных рецепторов и раздражители, которые они воспринимают. В таблице выше представлен список и классификация большинства сенсорных рецепторов тела. Согласно этой таблице, выделяют пять основных типов сенсорных рецепторов:
(1) механорецепторы, реагирующие на механическое сжатие или растяжение самого рецептора или смежных с ним тканей;
(2) терморецепторы, воспринимающие изменения температуры: одни из них реагируют на холод, другие — на тепло;
(3) ноцицепторы (болевые рецепторы), реагирующие на повреждение ткани независимо от природы повреждения (физической или химической);
(4) электромагнитные рецепторы, воспринимающие свет на сетчатке глаза;
(5) хеморецепторы, которые обнаруживают вкус во рту, запах в носу, уровень кислорода в артериальной крови, осмоляльность жидкостей тела, концентрацию углекислого газа и, возможно, другие химические факторы нашего тела.
В статьях на сайте мы обсудим функцию нескольких типов рецепторов, прежде всего периферических механорецепторов, для иллюстрации некоторых общих принципов работы рецепторов. Другие рецепторы обсуждаются в главах, посвященных соответствующим сенсорным системам, в составе которых они функционируют. На рисунке ниже показаны некоторые механорецепторы, расположенные в коже или глубоких тканях тела.
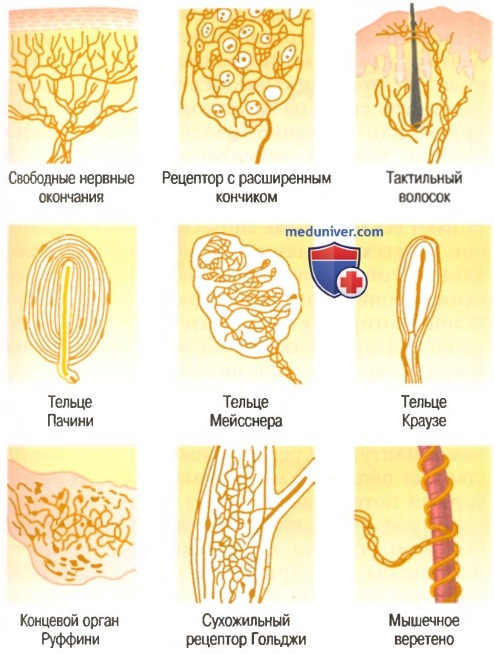
Некоторые типы соматических рецепторов
б) Специфическая чувствительность рецепторов. Прежде всего, необходимо ответить на вопрос, почему разные типы сенсорных рецепторов реагируют на различные типы раздражителей? Ответом на этот вопрос является специфическая чувствительность рецепторов. Это значит, что каждый тип рецептора высокочувствителен к определенному типу стимула, для восприятия которого он предназначен, и практически нечувствителен к другим типам сенсорных стимулов.
Так, палочки и колбочки глаза высокочувствительны к свету, но почти совсем не реагируют на нормальные диапазоны изменений температуры, давления на глазные яблоки или химических показателей крови. Осморецепторы супраоптических ядер гипоталамуса обнаруживают самые незначительные изменения осмоляльности внеклеточных жидкостей тела, но пока неизвестны случаи их реакции на звук.
Наконец, рецепторы боли в коже почти никогда не стимулируются обычным прикосновением к коже или давлением на нее, но реагируют очень активно в тот момент, когда осязательные стимулы становятся достаточно сильными, чтобы повредить ткани.
в) Модальность ощущения. Принцип меченой линии. Отличительную особенность каждого из переживаемых нами ощущений (боль, прикосновение, свет, звук и т.д.) называют модальностью ощущения. Однако, хотя модальности ощущений различны, нервные волокна передают только импульсы. Справедлив вопрос: как возбуждение разных нервных волокон ведет к развитию ощущений различной модальности?
Ответ заключается в том, что каждый чувствительный тракт заканчивается в определенном участке центральной нервной системы, и тип ощущения, испытываемого при стимуляции нервного волокна, определяется тем участком нервной системы, к которому от него придет возбуждение. Например, если раздражается болевое волокно, человек чувствует боль независимо от того, стимул какого типа возбуждает волокно.
Это может быть электрическое раздражение самого волокна, его перегревание, раздавливание или стимуляция болевого рецептора при повреждении тканевых клеток. Во всех этих случаях человек почувствует боль. Аналогично, если тактильное волокно стимулируется электрическим раздражением тактильного рецептора или любым другим способом, человек чувствует прикосновение, поскольку по тактильным волокнам информация достигает определенных чувствительных областей головного мозга. Точно так же волокна от сетчатки глаза заканчиваются в зрительных областях мозга, слуховые пути от уха заканчиваются в слуховых областях, а температурные пути оканчиваются в температурных областях.
Таким образом, специфичность нервных путей способствует развитию ощущений только одной модальности. Эту особенность называют принципом меченой линии.
Видео физиология анализаторов - общая схема - профессор, д.м.н. П.Е. Умрюхин
Редактор: Искандер Милевски. Дата обновления публикации: 18.3.2021
Соматосенсорная система. Тактильные ощущения
Соматосенсорная система объединяет нервные механизмы, собирающие сенсорную информацию от всего тела. Соматические ощущения противостоят специфическим чувствам, к которым относят зрение, слух, запах, вкус и равновесие.
а) Классификация соматических ощущений. Можно выделить три физиологических типа соматических ощущении:
(1) механорецептивные, включающие тактильные ощущения и чувство положения; они стимулируются механическими смещениями некоторых тканей тела;
(2) терморецептивные, возникающие под действием тепла и холода;
(3) болевые, возникновение которых связано с действием любого фактора, повреждающего ткани.
б) Другие классификации соматических ощущений. Существуют также другие классификации соматических ощущений:
(1) экстероцептивные ощущения, возникающие при раздражении рецепторов, расположенных на поверхности тела;
(2) проприоцептивные ощущения, имеющие отношение к физическому состоянию тела, включая положение тела, состояние мышц и сухожилий, степень давления на подошвы стоп и даже ощущение равновесия (которое часто рассматривают как специфическое, а не соматическое ощущение).
Висцеральные ощущения связаны с состоянием внутренних органов. Глубокие ощущения исходят от глубоких тканей, например фасций, мышц и костей. К этим ощущениям относят главным образом «глубокое» давление, боль и вибрацию.
в) Восприятие и передача тактильных ощущений. Взаимоотношение между ощущениями прикосновения, давления и вибрации. Хотя прикосновение, давление и вибрацию часто считают отдельными ощущениями, все они воспринимаются одними и теми же типами рецепторов. Существуют три основных различия между ними:
(1) ощущение прикосновения обычно возникает при стимуляции тактильных рецепторов в самой коже или в тканях, расположенных сразу под ней;
(2) ощущение давления вызывает деформация более глубоких тканей;
(3) вибрация ощущается при действии быстро повторяющихся сигналов в результате возбуждения некоторых из рецепторов, воспринимающих прикосновение и давление.
Некоторые типы соматических рецепторов
1. Тактильные рецепторы. Известны, по крайней мере, шесть совершенно разных типов тактильных рецепторов, но гораздо больше их разновидностей. Некоторые из этих рецепторов показаны на рисунке выше; их функциональные особенности представлены далее.
Первый тип рецепторов — свободные нервные окончания. Они повсеместно распространены в коже и во многих других тканях и реагируют на прикосновение и давление. Например, даже легкий контакт с роговой оболочкой глаза, в которой нет других рецепторов, кроме свободных нервных окончаний, тем не менее, вызывает ощущения прикосновения и давления.
Второй тип рецепторов — высокочувствительное осязательное тельце Мейсснера (для облегчения понимания просим вас изучить рисунок выше). Оно представляет собой удлиненное инкапсулированное окончание миелинового чувствительного нерва типа Аβ. Внутри капсулы нервное окончание разветвляется на множество волоконец. Тельца Мейсснера локализуются в лишенных волосяного покрова участках кожи, но особенно много их в кончиках пальцев рук, губах и других областях, где у человека высоко развита способность к пространственному различению тактильного раздражения. Тельца Мейсснера адаптируются в течение доли секунды от начала их стимуляции, поэтому они особенно чувствительны к движению объектов по поверхности кожи, а также к вибрации низкой частоты.
Третий тип — диски Меркеля (для облегчения понимания просим вас изучить рисунок ниже). Их относят к тактильным рецепторам с расширенным кончиком. Значительное количество этих рецепторов встречается в кончиках пальцев рук и других лишенных волосяного покрова участках кожи, содержащих большое количество телец Мейсснера. Волосистые участки кожи также содержат умеренное количество рецепторов с расширенным кончиком, хотя здесь почти нет телец Мейсснера. Диски Меркеля отличаются от телец Мейсснера характером адаптации: сначала в них возникает сильный, частично адаптирующийся сигнал, затем в рецепторе длительное время сохраняется более слабый, очень медленно адаптирующийся сигнал. Следовательно, эти рецепторы ответственны за передачу стабильных сигналов, позволяющих ощущать непрерывный контакт объектов с кожей.
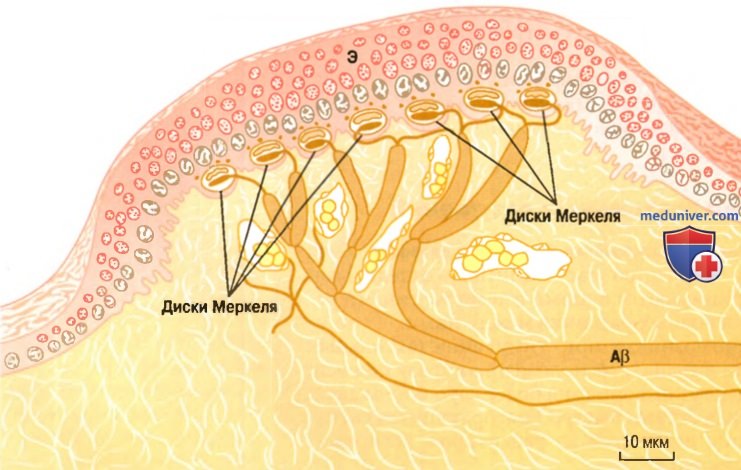
Рецептор купола Игго. Видно большое количество дисков Меркеля, связанных с одним толстым миелинизированным нервным волокном (Аβ) и тесно прилежащих к нижней поверхности эпителия (Э)
Диски Меркеля часто группируются вместе, формируя рецепторный орган, называемый куполом Игго, который упирается в кожу с нижней стороны эпителия (для облегчения понимания просим вас изучить рисунок выше). Эпителий в этой точке выдается наружу, формируя купол, содержащий чрезвычайно чувствительный рецептор. Обратите внимание, что вся группа дисков Меркеля иннервируется одним толстым миелинизированным нервным волокном (тип А). Эти рецепторы наряду с тельцами Мейсснера играют важную роль в локализации тактильных ощущений на поверхности тела и в определении поверхностной структуры ощущаемого объекта.
Четвертый тип включает рецепторы, ответственные за ощущения, возникающие при движении любого волоса на теле. При этом стимулируется нервное волокно, обвивающее основу волоса, которое называют волосяным рецептором. Таким образом, каждый волос и нервное волокно в его основании являются тактильным рецептором. Этот рецептор быстро адаптируется и подобно тельцам Мейсснера реагирует главным образом на (а) движение объектов по поверхности тела или (б) первичный контакт раздражителя с телом.
К пятому типу можно отнести рецепторы Руффини — инкапсулированные, сильно разветвленные окончания (для облегчения понимания просим вас изучить первый рисунок выше). Их много в глубоких слоях кожи, а также в еще более глубоких внутренних тканях. Эти рецепторы адаптируются очень медленно и, следовательно, важны для передачи информации о непрерывной деформации тканей, возникающей, например, при интенсивном длительном прикосновении и давлении. Рецепторы Руффини обнаружены также в суставных сумках и помогают определять степень вращения сустава.
Шестой тип — тельца Пачини, которые подробно обсуждались в отдельной статье на сайте (просим вас пользоваться формой поиска выше). Они лежат как непосредственно под кожей, так и глубоко в фасциальных тканях тела. Тельца стимулируются только быстрым локальным сжатием тканей, поскольку адаптируются в течение нескольких сотых долей секунды, поэтому данные рецепторы особенно важны для восприятия вибрации тканей или других быстрых изменений их механического состояния.
Редактор: Искандер Милевски. Дата обновления публикации: 18.3.2021

Не секрет, что самым большим органом человеческого тела является его кожа. Помимо защиты тела от внешних раздражителей, кожа выполняет еще и функцию датчика, собирающего информацию, наряду с глазами, ушами, языком и носом. Информация, получаемая кожей, позволяет человеку оценивать окружающую среду, лучше понимать ситуацию, в которой он находится и действовать в соответствии с ней. Несмотря на огромную важность тактильной информации, о том как именно все работает мы пока знаем не особо много. Посему ученые из Калифорнийского университета (США) решили рассмотреть кожу человека под математическим углом, дабы понять механизм возникновения и передачи тактильных ощущений. Что происходит, когда мы берем что-то в руки, как наша кожа обрабатывает получаемую информацию, и как данное исследование применить на практике? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
У взрослого человека площадь его кожи может достигать 2.3 м2, что делает ее самым большим органом. Однако габариты ничто, если за ними нет никакого функционала. Кожа выполняет достаточно много функций: защитная, дыхательная, экскреторная, терморегуляторная, иммунная, метаболическая и т.д. Другими словами, пытаясь оценивать разные органы по их важности, ставить кожу на последнее место было бы ошибочно.
Самой же загадочной функцией кожи является сбор информации, т.е. формирование осязания — одного из видов чувств человека. Такова температура в комнате, шершавые или гладкие обои, насколько мягкое кресло — все эти и многие другие данные собираются именно кожей.
Невероятная чувствительность кожи заключается в наличии колоссального числа нервных окончаний, т.е. рецепторов. Все они отличаются друг от друга по форме и строению, поскольку выполняют разные задачи (одни собирают информацию про фактуру объекта, другие — про температуру, например).
Рецепторы кожи можно разделить на два основных типа: свободные нервные окончания и несвободные нервные окончания. Первые состоят исключительно из конечных ветвлений осевого цилиндра и располагаются в эпителии. Эти рецепторы собирают данные о температуре (терморецепторы), давлении (механорецепторы) и болевых ощущениях (ноцицепторы).

Категоризация несвободных нервных окончаний куда более обширная:
- тельца Пачини — рецепторы давления в подкожно-жировой клетчатке;
- тельца Мейснера — рецепторы давления в дерме;
- тельца Меркеля — рецепторы давления в глубоких слоях эпидермиса;
- тельца Руффини — рецепторы растяжения, реагирующие на тепло;
- колбы Краузе — рецепторы в надсосочковом слое дермы (якобы реагируют на холод, но это под вопросом);
- рецепторы волосяных фолликулов — механорецепторы, которые реагируют на изменение положения волоса.
Это лишь краткий перечень, без глубокого рассмотрения рецепторов, их функций и строения, но и этого достаточно, чтобы понять всю сложность кожи как органа чувств.
Сами исследователи трактуют осязание как кодирование механических сигналов, собранных кожей и подкожными тканями, в нейронные сигналы. Нейронные ответы на тактильные раздражители часто связаны с механическими воздействиями, возникающими из небольших участков кожи, однако есть свидетельства о том, что динамическое прикосновение вызывает механические волны в тактильном диапазоне частот, которые распространяются по всей руке, с переходными возбуждениями, затухающими в течение 30 мс. Таким образом, динамические тактильные воздействия могут стимулировать широкое распространение афферентации*.
Было обнаружено, что эти волны, вызванные прикосновением, способствуют тонкому восприятию и могут использоваться для определения характеристик объекта, к которому дотронулись, области контакта объекта с рукой и дальнейших действий. Также есть данные, что рецептивные поля нейронов в соматосенсорных областях коры мозга охватывают большие участки рук и нескольких пальцев.
Большая площадь контакта на ранних этапах обработки сигналов побуждает корковые нейроны отвечать на входные сигналы, которые доставляются обратно в область контакта.
Таким образом, соматосенсорная обработка может зависеть от информации, переносимой механическими волнами, которые распространяются в тканях в отдаленные участки, удаленные от мест непосредственного механического контакта.
Ученые считают, если перенос механических волн в руке способствует эффективному кодированию соматосенсорной информации, то должна быть возможность описать тактильные стимулы в малых участках посредством информативных параметров. Другими словами преобразовать ощущение прикосновения в цифры.
В своем труде ученые показывают, как механические волны в руке производят эффективное кодирование тактильных входных данных. Проведя опыты с использованием высокоточных датчиков, ученые смогли создать своего рода словарик пространственно-временных сигналов, которые в совокупности позволяют классифицировать входящую информацию с точностью более 95%. То есть им удалось создать карту, показывающую где и какие области кожи руки активируются при контакте с тем или иным объектом.
Результаты исследования
Моделирование тактильной информации ученые изобразили в виде матричного разложения. Оценка кодирования была выполнена посредством собранной в ходе опытов базы данных тактильных стимулов для всей кисти, включающую пространственно-временные изменения кожи a(x, t). На руку добровольца были прикреплены специальные датчики в 30 участках (х). В ходе эксперимента было выполнено 13 жестов и 4600 взаимодействий с различными объектами.

Изображение №1
Каждый из стимулов wi(x, t), внесенный в набор данных, имел собственное время активации hi(t), которое также было учтено в модели для получения более точных «тактильных базовых паттернов» (2А), которые в совокупности кодируют все возникающие стимулы и передающиеся сигналы.

Изображение №2
Эти базисные паттерны (далее базисы) также могут быть интерпретированы как набор фильтров анализа, которые извлекают информацию из внешних стимулов с помощью различных дополнительных паттернов пространственно-временной интеграции механических сигналов в руке. По словам ученых, эти фильтры можно сравнить с функциями спектрально-временной настройки в слуховой обработке или с фильтрами пространственно-временного рецептивного поля при работе сетчатки.
Суммируя, учеными была создана математическая модель, в которой сигналы, ощущаемые по всей руке, были представлены в виде небольшого числа упрощенных паттернов. Данная методика позволила получить основные волновые паттерны — вибрации кожи по всей кисти, которые участвуют в сборе и передаче тактильной информации.
Несмотря на то, что в анализе не учитывались условия возникновения сигналов, тактильные базисы напоминали сенсорную функцию кисти (2А и 2В). Большинство из них первоначально были локализованы на дистальных концах одного из пальцев (наиболее плотно иннервируемые области кисти). Скорость движения сигналов составляла порядка 1-10 м/с, а затухание сигнала наблюдалось спустя 10-30 мс после его возникновения. Другие тактильные базисы эволюционировали от дистальной области отдельных пальцев до диффузных областей поверхности кисти (2А). В аспекте частоты, пара базисов демонстрировала схожее пространственное расположение, но разные частотные характеристики. К примеру, есть пара базисов, локализованных в пределах одного пальца, но имеющих разные фильтрационные свойства (относительно передаваемых сигналов): нижний диапазон от 20 до 80 Гц (2В, базис 2) или верхний диапазон от 80 до 160 Гц (2B, базис 6).

Изображение №3
Ученые считают, что пространственно-временные тактильные базисы связаны с определенным пальцем, т.е. имеют свою рабочую зону, так сказать. Например, 45% из 4600 проанализированных тактильных раздражителей были вызваны жестами, когда с объектом контактировал только один палец. Проведя повторный анализ, исключающий тактильные сигналы, создаваемые одним лишь пальцем, была обнаружена такая же тенденция.
Пространство возможных тактильных раздражителей ограничено механикой и продолжительностью контакта (3А).
Далее ученые решили проверить, сколько базисов должно быть задействовано для определения источника сигнала. Как оказалось, если использовать не менее 7, то точность определения составит 90%, а если 12, то 95%. Тем не менее, не все стимулы требуют активации столь большого числа базисов для повышения точности. Логика достаточно прямолинейна: когда в жесте задействовано несколько пальцев, то активируются несколько базисов; если же в жесте задействован лишь один палец, то и базисов будет один, максимум два. При этом сами базисы также варьировались в зависимости от жестов. То есть, разные жесты, хоть в них и задействованы одинаковые пальцы, будут активировать разные базисы.
Модель также показала, что достаточно пяти базисов для максимизации точности (80%), с которой стимулы от одного участника опытов могли быть классифицированы с использованием данных от других участников (3C). Эти пять базисов были практически универсальны среди всех участников и соответствовали пяти пальцам кисти (3B).
Совокупность вышеописанных наблюдений говорит о том, что сама эластичность кожи играет важную роль в сборе и передаче информации, поскольку за счет нее увеличивается площадь контакта с объектом. Кроме того, волны сигналов, распространяющиеся по определенному паттерну, позволяют классифицировать полученную информацию, что также способствует ускорению ее обработки непосредственно мозгом.
Подобные механизмы обработки сигналов можно сравнить с работой среднего уха, которое распространяя звуки с различным частотным содержанием на разные сенсорные рецепторы в ухе, помогает кодированию звуков слуховой системой.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
Данное исследование показало нам, что кожа является намного более сложной системой, чем считалось ранее. Если раньше процесс передачи сигналов можно было описать линейно (прикосновение — возникновение сигнала — передача сигнала в мозг), то сейчас этот процесс скорее похож на волновую активность. Сигналы, получаемые от объектов взаимодействия с кожей, распространяются волнами по нервным окончаниям кожи в зависимости от зоны контакта, его продолжительности и характера поверхности. Другими словами, в сборе информации про объект контакта участвуют не только рецепторы в непосредственно месте контакта, но и рецепторы вокруг этой зоны.
Исследователи считают, что в этом сложном процессе не последнюю роль играет эластичность кожи, позволяющая увеличить площадь контакта с точки зрения распространения сигналов, а не с точки зрения непосредственно самого контакта.
По мнению ученых, их труд позволит не только лучше понять работу мозга и нервной системы человека, но и пригодится в разработке новых протезов и даже роботов, способных тактильно более точно собирать информацию об окружающей среде.
Для создания протеза может потребоваться множество сложных запчастей и лабораторный комплекс или конструктор LEGO и креативный подход.
Благодарю за внимание, оставайтесь любопытствующими и отличных всем выходных, ребята! :)
Немного рекламы :)
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Equinix Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
Читайте также: